Coverage: 0.25%


Coverage: 2.8%


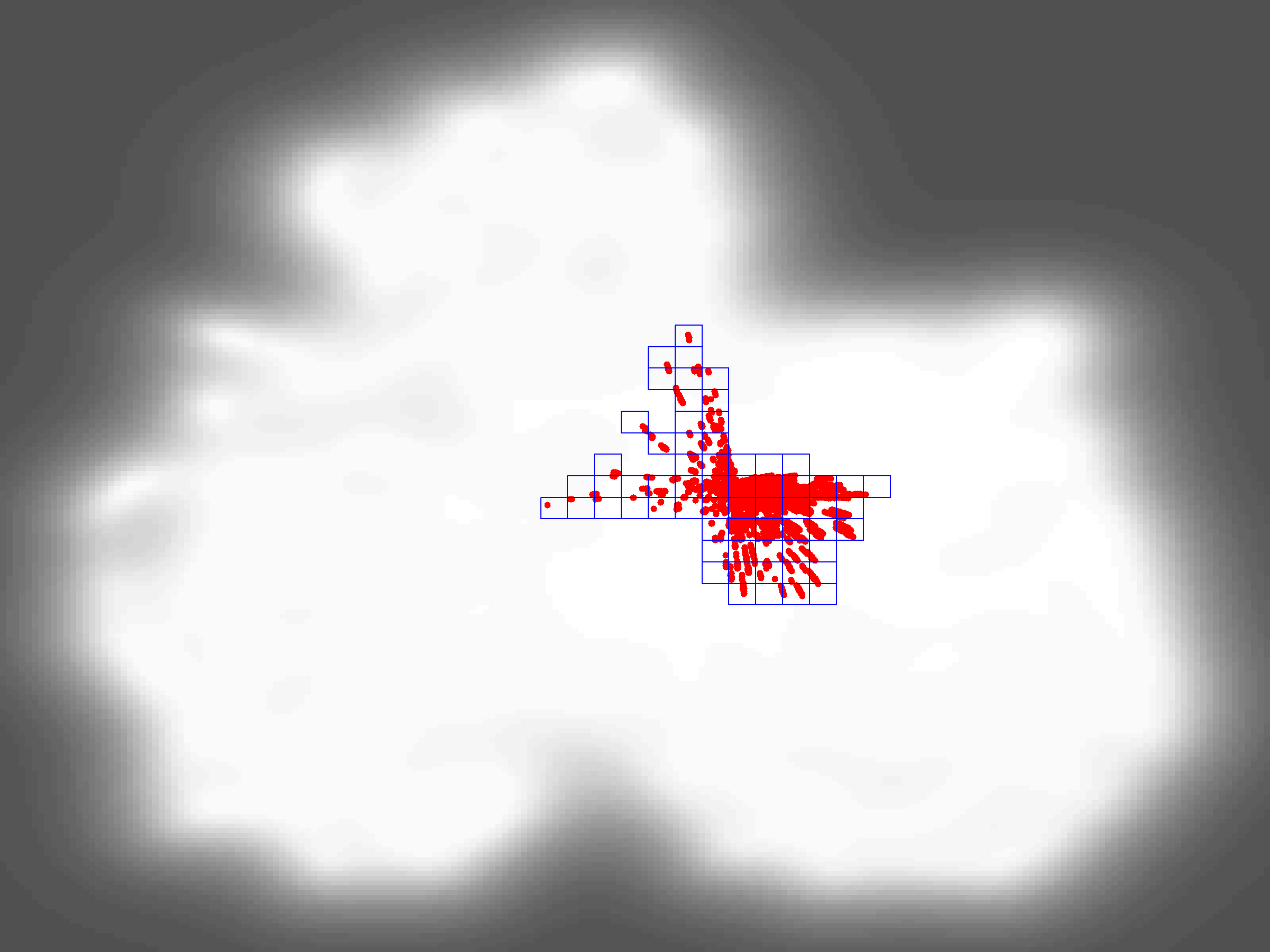
Coverage: 5.2%
with random sampling 9.2 %

| Hand Description | Picture of the Hand | Latent space Projection |
|---|---|---|
| Otto Bock SensorHand Coverage: 0.25% |
|
|
| Otto Bock Michelangelo Hand Coverage: 2.8% |
|
|
| FRH-4 Hand of ARMAR Coverage: 5.2% with random sampling 9.2 % |
|
|