The measurement was performed at LMU in Munich at the Lab of Heiner Deubel in collaboration with Javier Romero (libicocco[at]gmail.com) from KTH, Stockholm, Sweden.
The setup was the following:
The average hand length and width were 185.2mm and 81.1mm respectively, with
standard deviations 13.3mm and 7.4mm. A Polhemus Liberty system with six magnetic sensors was used for recording the
data. The spatial and angular resolution of each sensor is 0.8 mm and 0.15 degrees respectively. A sensor was applied
to each fingertip, positioned on the fingernail and one was placed on the dorsum of the hand. See left Figure below for how
the markers were applied to the hand.
The subjects were asked to perform the 31 different grasp
types as described in the taxonomy section on an object typical for the specific grasp. The grasps "Distal Type" and "Tripod Variation" were
omitted due to their very special nature. An updated grasp list can be found here.
They were shown a picture of each grasp and a demonstration of the grasp was performed if the subject had
problems mimicking the grasp on the picture to start with. Initially, the hand was placed in front of the table in a flat hand
posture. Upon a starting signal, the subject grasped an object with the desired grasp type, lifted the object (this moment is
shown in the right Figure below), put it down again and retreated the hand to the starting position.
The data recording started when the hand began to move and ended when the hand was returned to the initial position.
Each grasp type was performed twice, the first one was used to create the test set and the second one the training set. To
eliminate the global hand movements, the fingertip sensors were transformed into the wrist coordinate system.
Sensors applied to the hand
Actual grasp posture
The recorded movements are stored in a matrix, where different versions can be downloaded below.
The size of the matrix is 5 subjects x 2 trials x 31 grasp types x N samples x D dimensions.
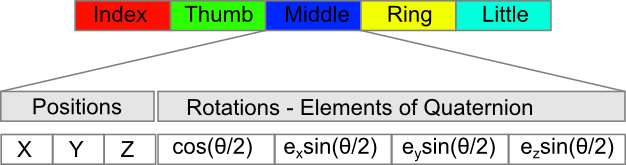
Datasets with rotation matrices
The dimension D of the dataset is 60 (5x12) and they are distributed as following.
Additionally the raw data is provided, which is not tranformed into the wrist coordinate system. Therefore the global movement of the hand is still present in the data.
As in that case there is an additional sensor (the wrist sensor) the dimensions D increase by 12. The data of the wrist is in between the thumb and the middle finger.
That means that the ordering of the fingers in the raw data is: Index - Thumb - Wrist (the reference sensor) - Middle - Ring - Little.
The dimension D of the dataset is 35 (5x7) and they are distributed as following.
Again the raw data is also provided. This increases the dimension D to 42. The ordering of the sensors is the following: Index - Thumb - Wrist - Middle - Ring - Little.
Power Disk: flat cylinder, 8cm dia 2mm high, mini CD
Power Sphere: Tennis Ball (sphere 67mm dia)
Precision Disk: CD
Precision Sphere: Tennis Ball
Tripod: Golf Ball (sphere 43mm dia)
Fixed Hook: cylinder 3cm dia
Lateral: Credit Card
Index Finger Extension: Cylinder 3cm dia
Extension Type: Plate
Writing Tripod: Cylinder 1cm dia
Parallel Extension: Box,4 cm thick
Adduction Grip: Cylinder, 1cm dia
Tip Pinch: 5mm Cube
Lateral Tripod: Bottle Cap
Sphere 4 Finger: Tennis Ball
Quadpod: Golf Ball
Sphere 3 Finger: Tennis Ball
Stick: Cylinder 1cm dia
Palmar: Plate
Ring: Cylinder, 64mm dia
Vental: Cylinder 1cm dia
Inferior Pincer: Golf ball (sphere 43mm dia)
For citation of the Toolbox please use the following, depending on which fits better:
J. Romero, T. Feix, H. Kjellström, and D. Kragic,
"Spatio-temporal modeling of grasping actions," 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, October 2010, pp. 2103-2108.
[Online]. Available: http://grasp.xief.net bib
----OR----
T. Feix, J. Romero, C. H. Ek, H.-B. Schmiedmayer, and D. Kragic,
"A metric for Comparing the Anthropomorphic Motion Capability of Artificial Hands," Robotics, IEEE Transactions on, vol. 29, no. 1, pp. 82-93, Feb. 2013.
[Online]. Available: http://grasp.xief.net bib,
pdf,
IEEE